Version 2022.45.15
Released April 8, 2023
FSD Beta v11.3.6
Included in 2022.45.15
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
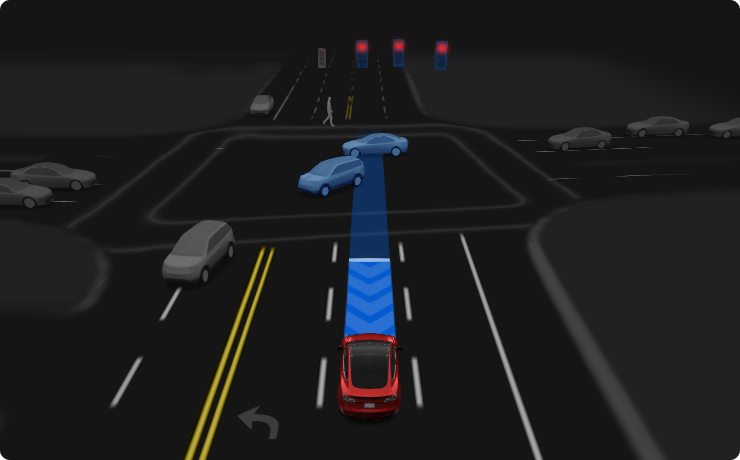
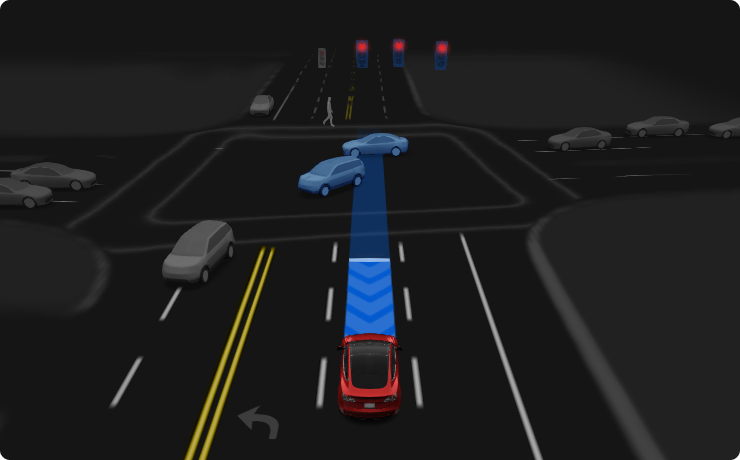
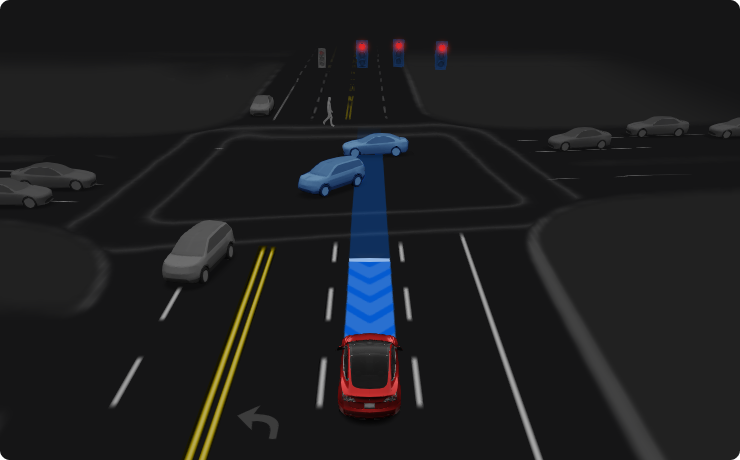
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
Over-the-Air (OTA) recall
Included in 2022.45.15
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
FSD Beta v11.3.5
Included in 2022.45.14
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
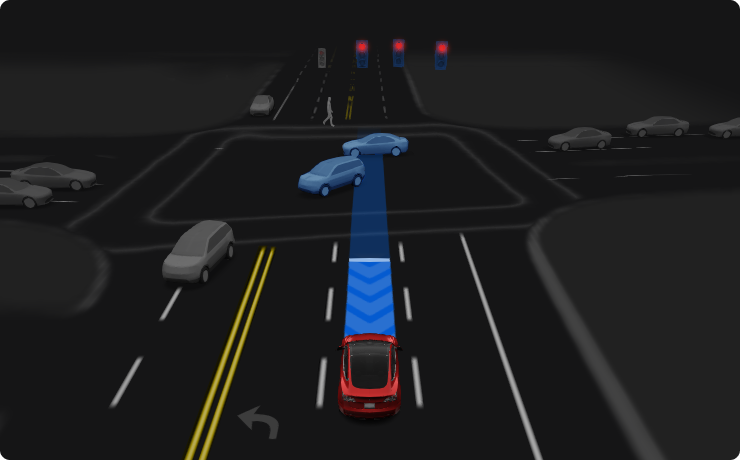
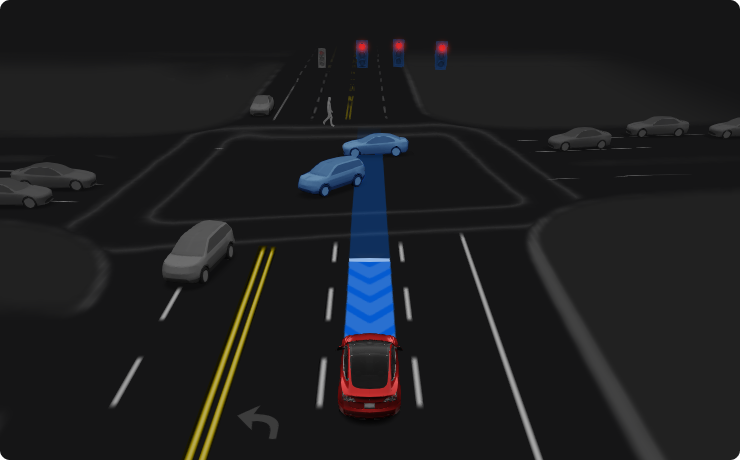
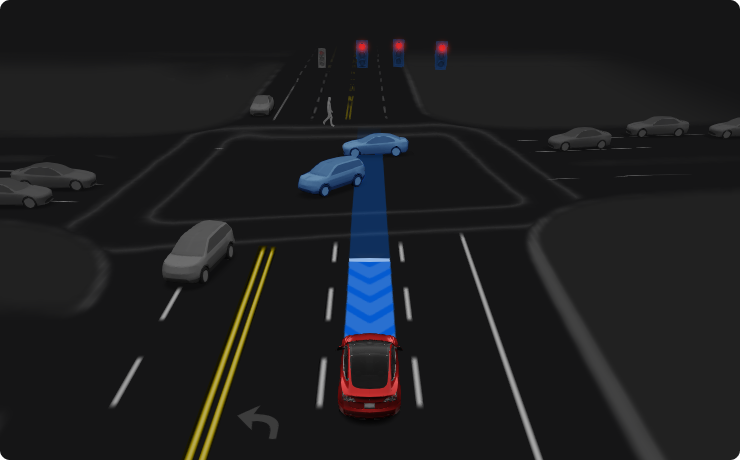
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
Over-the-Air (OTA) recall
Included in 2022.45.14
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
FSD Beta v11.3.4
Included in 2022.45.13
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
Over-the-Air (OTA) recall
Included in 2022.45.13
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
FSD Beta v11.3.3
Included in 2022.45.12
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
Over-the-Air (OTA) recall
Included in 2022.45.12
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
FSD Beta v11.3.2
Included in 2022.45.11
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
- Adjusted position of Automatic Blind Spot Camera when FSD Beta is active to prioritize the Autopilot visualization. Drag the camera to save custom positions.
Over-the-Air (OTA) recall
Included in 2022.45.11
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.
FSD Beta v11.3.1
Included in 2022.45.10
- Enabled FSD Beta on highway. This unifies the vision and planning stack on and off-highway and replaces the legacy highway stack, which is over four years old. The legacy highway stack still relies on several single-camera and single-frame networks, and was setup to handle simple lane-specific maneuvers. FSD Beta's multi-camera video networks and next-gen planner, that allows for more complex agent interactions with less reliance on lanes, make way for adding more intelligent behaviors, smoother control and better decision making.
- Improved recall for close-by cut-in cases by 15%, particularly for large trucks and high-yaw rate scenarios, through an additional 30k auto-labeled clips mined from the fleet. Additionally, expanded and tuned dedicated speed control for cut-in objects.
- Improved the position of ego in wide lanes, by biasing in the direction of the upcoming turn to allow other cars to maneuver around ego.
- Improved handling during scenarios with high curvature or large trucks by offsetting in lane to maintain safe distances to other vehicles on the road and increase comfort.
- Improved behavior for path blockage lane changes in dense traffic. Ego will now maintain more headway in blocked lanes to hedge for possible gaps in dense traffic.
- Improved lane changes in dense traffic scenarios by allowing higher acceleration during the alignment phase. This results in more natural gap selection to overtake adjacent lane vehicles very close to ego.
- Made turns smoother by improving the detection consistency between lanes, lines and road edge predictions. This was accomplished by integrating the latest version of the lane-guidance module into the road edge and lines network.
- Improved accuracy for detecting other vehicles' moving semantics. Improved precision by 23% for cases where other vehicles transition to driving and reduced error by 12% for cases where Autopilot incorrectly detects its lead vehicle as parked. These were achieved by increasing video context in the network, adding more data of these scenarios, and increasing the loss penalty for control-relevant vehicles.
- Extended maximum trajectory optimization horizon, resulting in smoother control for high curvature roads and far away vehicles when driving at highway speeds.
- Improved driving behavior next to row of parked cars in narrow lanes, preferring to offset and staying within lane instead of unnecessarily lane changing away or slowing down.
- Improved back-to-back lane change maneuvers through better fusion between vision-based localization and coarse map lane counts.
- Added text blurbs in the user interface to communicate upcoming maneuvers that FSD Beta plans to make. Also improved the visualization of upcoming slowdowns along the vehicle’s path. Chevrons render at varying opacity and speed to indicate the slowdown intensity, and a solid line appears at locations where the car will come to a stop.
- Improved the recall and precision of object detection, notably reducing the position error of semi-trucks by 10%, increasing the recall and precision of crossing vehicles over 100m away by 3% and 7%, respectively, and increasing the recall of motorbikes by 5%. This was accomplished by implementing additional quality checks in our two million video clip autolabeled dataset.
- Reduced false offsetting around objects in wide lanes and near intersections by improving object kinematics modeling in low speed scenarios.
Over-the-Air (OTA) recall
Included in 2022.45.10
In accordance with a recent recall (campaign #23V085 for US and #2023-063 for Canada), Tesla is making improvements to the following specific behaviors within FSD Beta:
1. Improved decision logic to proceed through or stop at certain yellow lights by modeling the decision as a tradeoff framework that considers estimated: deceleration required to stop, time to enter and exit the intersection, and the distance traversed across the intersection before the light transitions to red. This should make yellow light handling more natural and human-like.
2. Improved the longitudinal slowdown control profile when leading up to stop sign intersections to make the overall maneuver feel more perceptible and natural.
3. Improved the Tesla’s speed adjustment when entering certain speed zones by allowing for earlier control for detected speed limit signs. The assertiveness of the response when slowing down for detected speed limit signs is determined by the current speed and its difference to the speed indicated by the detected sign. Added a visual glow behind the speed limit icon on the user-interface to alert the driver when the vehicle’s set speed exceeds the detected speed limit by more than 50%. Finally, the option for an absolute Speed Limit offset in FSD Beta was removed; only the percent-based offset will be available.
4. Updated the behavior for certain scenarios where the Tesla may maneuver from a turn lane to continue traveling straight. These maneuvers will now be treated as a lane change, where the turn indicator is used to alert other drivers of the Tesla’s intent.
As a reminder, the driver is responsible for vehicle operation even when FSD Beta is engaged. You must constantly supervise the road, keep your hands on the wheel and be ready to intervene to maintain safety.